
Project Data skeletonisation based on papers in
TopoInVis 2019 |
AIAA 2019 |
CTIC 2014
ASk: Approximate Skeleton of a point cloud
  |
|
@incollection{elkin2021fast, title={A fast approximate skeleton with guarantees for any cloud of points in a Euclidean space}, author={Elkin, Yury and Liu, Di and Kurlin, Vitaliy}, booktitle={Topological Methods in Data Analysis and Visualization VI: Theory, Applications, and Software}, pages={245--269}, year={2021}, publisher={Springer} }- Input : a finite cloud C of n points in any Euclidean space.
- Output : an embedded straight-line Approximate Skeleton (ASk) approximating C with theoretical guarantees.
- Abstract. The tree reconstruction problem is to find an embedded straight-line tree that approximates a given cloud of unorganized points in R^m up to a certain error. A practical solution to this problem will accelerate a discovery of new colloidal products with desired physical properties such as viscosity. We define the Approximate Skeleton of any finite point cloud C in a Euclidean space with theoretical guarantees. The Approximate Skeleton ASk(C) always belongs to a given offset of C, i.e. the maximum distance from C to ASk(C) can be a given maximum error. The number of vertices in the Approximate Skeleton is close to the minimum number in an optimal tree by factor 2. The new Approximate Skeleton of any unorganized point cloud C is computed in a near linear time in the number of points in C. Finally, the Approximate Skeleton outperforms past skeletonization algorithms on the size and accuracy of reconstruction for a large dataset of real micelles and random clouds.
Back to Top of this page | Back to Research & papers | Back to Home page
Vortex structures around tandem flapping wing objects
 |
|
@inproceedings{ban2019development, title={Development of a Reconstruction Method for Major Vortex Structure around Tandem Flapping Wing Object via Vortex Trajectory Method}, author={Ban, Naohiko and Yamazaki, Wataru and Kurlin, Vitaliy}, booktitle={AIAA Scitech 2019 Forum}, pages={2224-2260}, year={2019} }- Abstract. Flapping wing micro air vehicle (MAV) is expected to apply in unmanned operations under risky / ultimate conditions. The MAV has to fly in low Reynolds number conditions. Previous researches indicated that flights by flapping motions as insects had higher performance at low Reynolds numbers. In nature, some insects have four flapping wings and achieve excellent flight performance such as hovering and steep turn. This is considered to be the effect of aerodynamic interference between fore and aft wings. The fluid mechanics of the flapping wing are, however, more difficult than traditional fixed wing due to its complex unsteady fluid physics at low Reynolds numbers. Therefore, there are various flight mechanisms within the flapping wing flight and these have not yet been fully clarified. Particle Image Velocimetry (PIV) is an efficient flow measurement technique which can measure such complex flowfield at one time. The visualization of the vorticity distribution is important for understanding the flowfield of the flapping wing object. On the other hand, however, the vorticity distribution obtained through image processing such as PIV analysis is difficult to understand the detailed vortex flowfield due to the data error or noisiness in the flowfield. In this research, therefore, we developed a reconstruction method of vorticity distribution as postprocessing method of PIV measurement for the purpose to assist the physical understanding of the noisy vorticity distribution. The developed method could clearly reconstruct small vortex structures in the backward of the flapping wing object which was difficult to discriminate by conventional vorticity visualizations.
Back to Top of this page | Back to Research & papers | Back to Home page
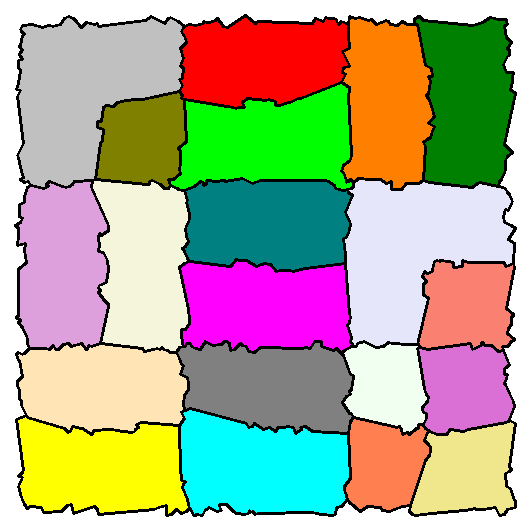
Auto-completion of contours in sketches and 2D images
  |
|
@inproceedings{kurlin2014auto, author = {Kurlin, V.}, title = {Auto-completion of contours in sketches, maps and sparse 2D Images based on topological persistence}, booktitle = {Proceedings of SYNASC 2014 workshop CTIC: Computational Topology in Image Context}, publisher = {IEEE}, year = {2014}, pages = {594-601} }- DOI : 10.1109/SYNASC.2014.85 Print ISBN : 978-1-4799-8447-3
- Input : a cloud of any points in the plane without extra parameters.
- Output : regions that are enclosed by most persistent closed contours.
- Run time : O(n log n) for any n points with real coordinates in the plane.
- Abstract. We design a new fast algorithm to automatically complete closed contours in a finite point cloud on the plane. The only input can be a scanned map with almost closed curves, a hand-drawn artistic sketch or any sparse dotted image in 2D without any extra parameters. The output is a hierarchy of closed contours that have a long enough life span (persistence) in a sequence of nested neighbourhoods of the input points. We prove theoretical guarantees when, for a given noisy sample of a graph in the plane, the output contours geometrically approximate the original contours in the unknown graph.
- C++ code : cloud-analysis.cpp (a beta-version, please e-mail vitaliy.kurlin(at)gmail.com for support).
Back to Top of this page | Back to Research & papers | Back to Home page